Mars Rover System
- Project Duration: 23 May to 30 June, 2022
- Project URL: GitHub
- Project Decumentation: Project Report
- Skills Required: C/C++, Python, Verilog.
- Project Location: Imperial College, London, UK
Project Description
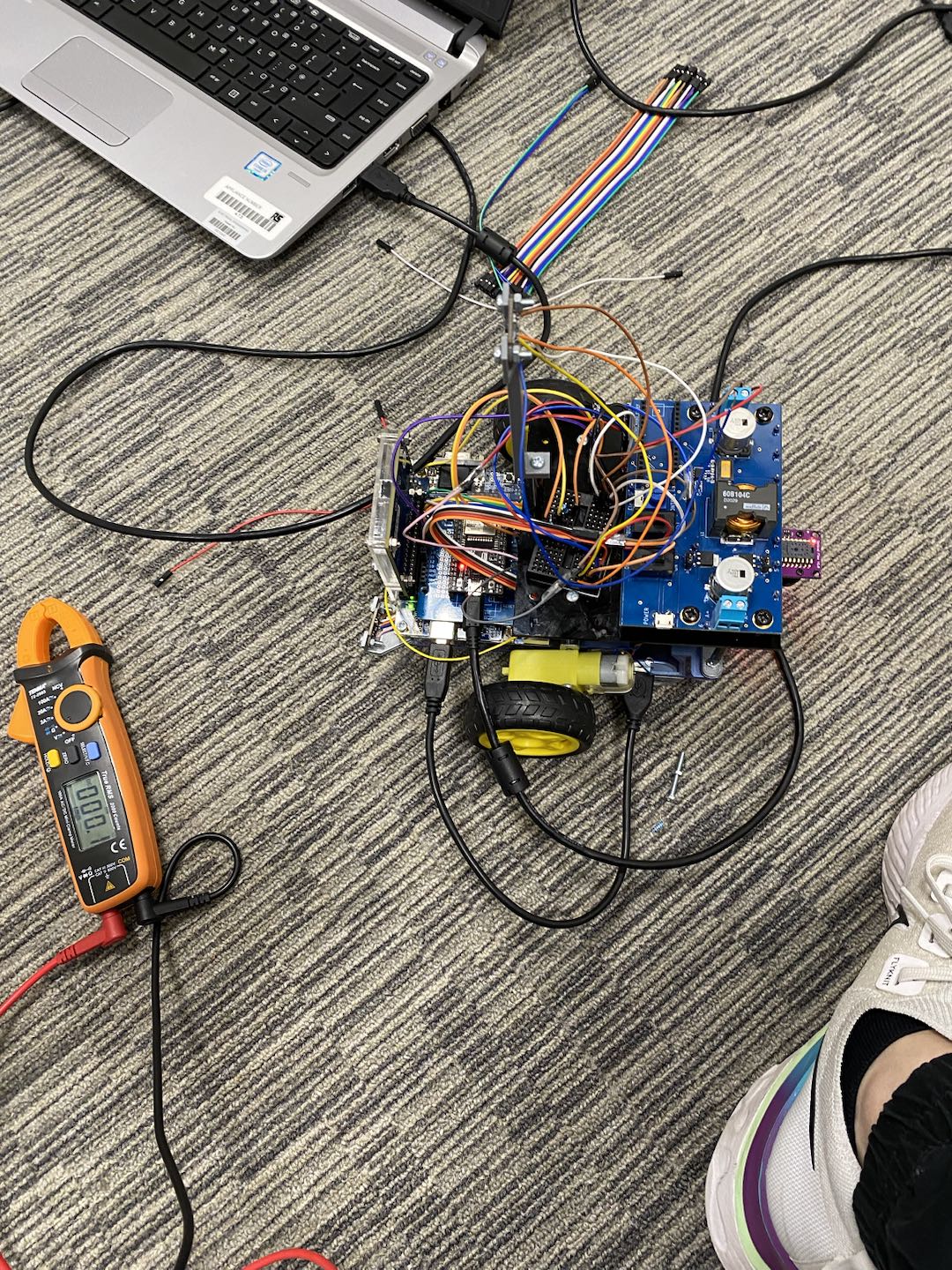
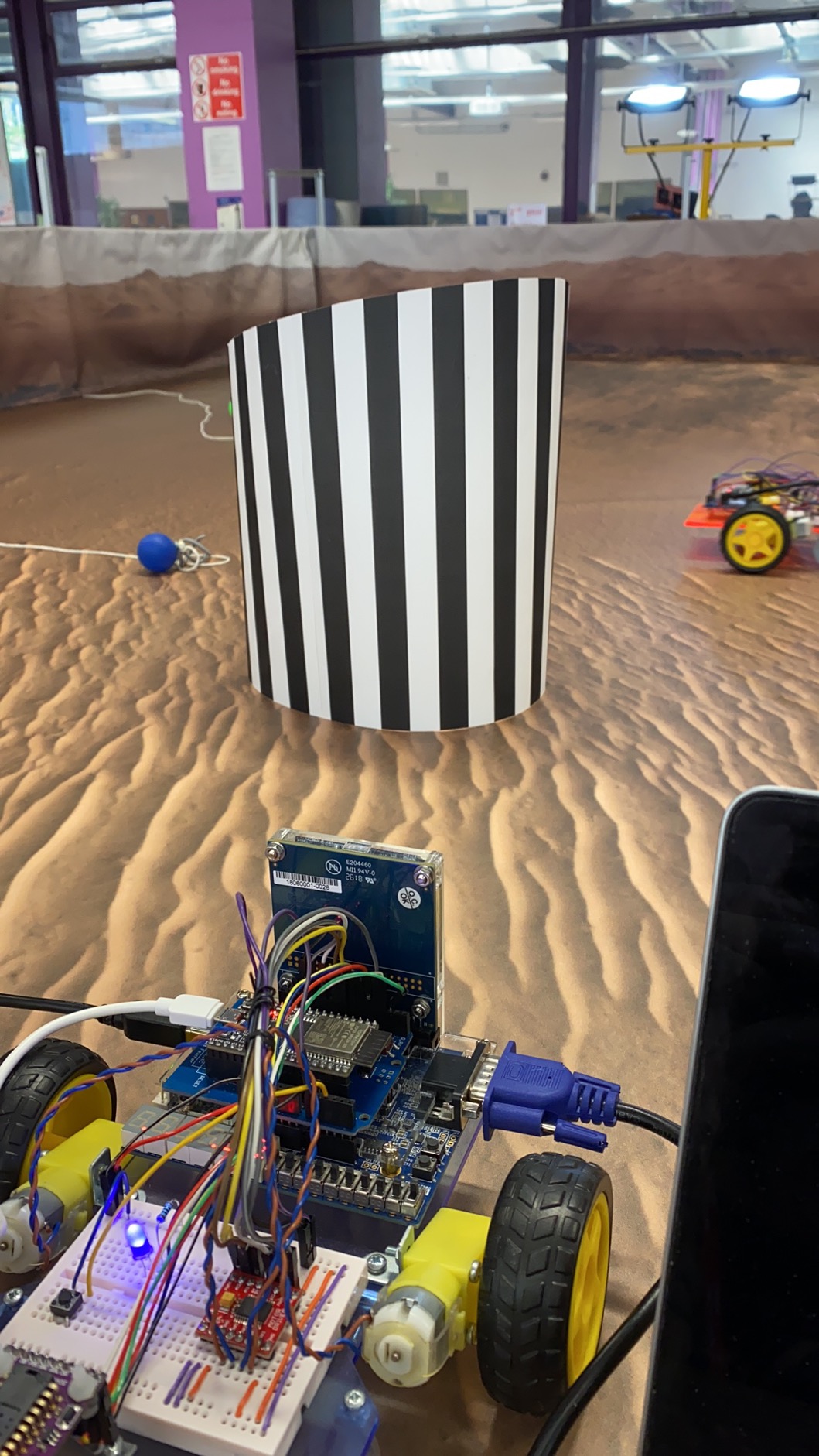
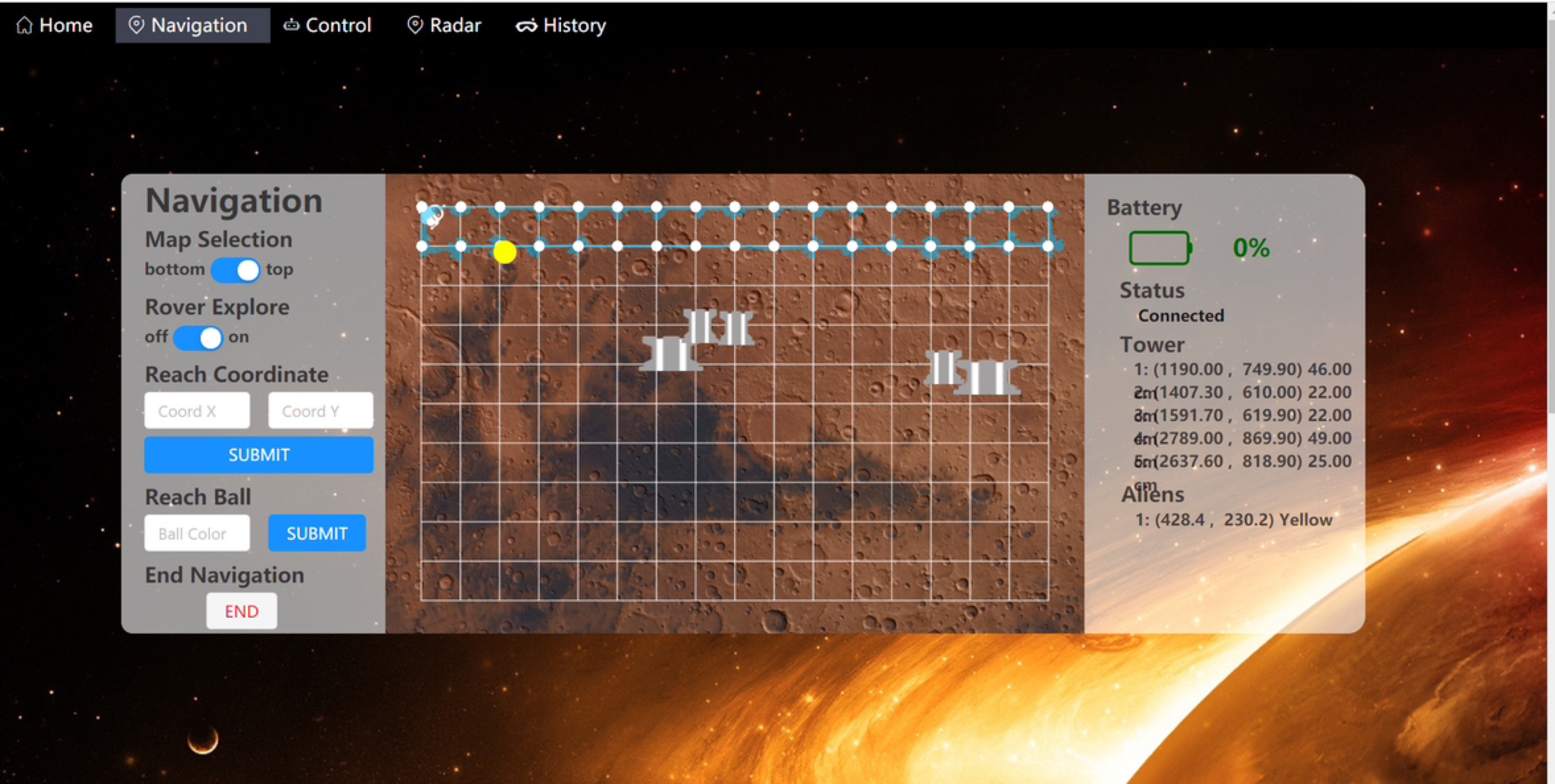
This project aims to develop a comprehensive system for a Mars Rover. The rover is designed to be remotely controlled and equipped with advanced obstacle autonomous detection and avoidance capabilities. Additionally, it could scan the entire surface, creating a detailed map on website that accurately locates all encountered obstacles.